🎯 Introduction
La librairie SchreinSerialParser est un analyseur de trames série robuste pour Arduino, conçu pour parser des messages au format <[controlName|propertyName|value]&checksum>. Elle offre une gestion d’erreurs avancée, des callbacks et une validation de checksum.
Installation de la Bibliothèque
- Téléchargez les fichiers
.het.cpp - Créez un dossier
SchreinSerialParserdans votre dossierlibraries/Arduino - Copiez les fichiers dans ce dossier
- Redémarrez l’IDE Arduino
📦 Installation
Structure des fichiers
SchreinSerialParser/
├── examples/
│ └── Basic_Usage
│ └── Basic_Usage.ino
├── src/
│ ├── SchreinSerialParser.h
│ └── SchreinSerialParser.cpp
│
│
│
├── README.txt
├── library.properties
└── keywords.txtInclusion dans le projet
#include "SchreinSerialParser.h"🔧 Initialisation
Création de l’instance
// Avec Serial standard
SchreinSerialParser parser(Serial);
// Avec Serial1, Serial2, etc.
SchreinSerialParser parser(Serial1);
// Avec SoftwareSerial
SoftwareSerial mySerial(10, 11);
SchreinSerialParser parser(mySerial);📖 Utilisation Basique
Exemple minimal
#include "SchreinSerialParser.h"
SchreinSerialParser parser(Serial);
void setup() {
Serial.begin(9600);
parser.enableChecksum(true); // Optionnel
}
void loop() {
parser.loop(); // À appeler régulièrement
if (parser.isFrameAvailable()) {
const char* value = parser.getValue("motor", "speed");
if (value != "") {
Serial.println("Vitesse: " + value);
}
parser.resetFrame();
}
}📡 Format des Trames
Structure de la trame
<[controlName|propertyName|value]&checksum>Exemples de trames valides
<[motor|speed|255]&04>
<[led|state|on]&1A>
<[sensor|temperature|23.5]&FF>🛠️ API Complète
Méthodes Principales
🔄 Gestion du cycle de vie
void loop(); // À appeler dans loop() principal
bool isFrameAvailable() const;
void resetFrame();📨 Réception de données
const char* value = getValue(const char* controlName, const char* key);📤 Envoi de données
// Création de commande
String cmd = SchreinSerialParser::command("motor", "speed", "255");
// Envoi simple
parser.sendFrame(cmd.c_str());⚙️ Configuration
// Timeout (défaut: 1000ms)
parser.setTimeout(2000);
// Activation checksum (défaut: false)
parser.enableChecksum(true);
// Taille du buffer (défaut: 256)
parser.setBufferSize(512);🎛️ Callbacks
// Gestion d'erreurs
parser.onError([](const char* error) {
Serial.println("❌ Erreur: " + error);
});
// Données brutes reçues
parser.onDataReceived([](const char* data) {
Serial.println("📥 Donnée: " + data);
});
// Frame parsée
parser.onFrameParsed([](const char* control, const char* key, const char* value) {
Serial.println(controlName + "." + key + " = " + value);
});🐛 Débogage
debugOutput()
// Affichage dans le moniteur série
parser.debugOutput("receiveMessage"); // Message brut reçu
parser.debugOutput("parsedFrame"); // Frame parsée
parser.debugOutput("completeFrame"); // Frame complète
parser.debugOutput("error"); // Dernière erreur
// Récupération comme String
parser.debugOutput("parsedFrame");Codes d’erreur
ErrorCode::NO_ERROR // Aucune erreur
ErrorCode::BUFFER_OVERFLOW // Buffer trop petit
ErrorCode::INVALID_FRAME // Format de trame invalide
ErrorCode::TIMEOUT // Timeout dépassé
ErrorCode::CHECKSUM_ERROR // Checksum invalide📋 Exemples Complets
Exemple 1: Communication Bidirectionnelle
#include "SchreinSerialParser.h"
SchreinSerialParser parser(Serial);
void setup() {
Serial.begin(9600);
parser.onFrameParsed(handleParsedFrame);
parser.onError(handleError);
}
void loop() {
parser.loop();
// Envoi périodique
static unsigned long lastSend = 0;
if (millis() - lastSend > 5000) {
String cmd = parser.command("sensor", "request", "data");
parser.sendFrame(cmd.c_str());
lastSend = millis();
}
}
void handleParsedFrame(const char* controlName, const char* key, const char* value) {
Serial.println("🎯 Frame reçue:");
Serial.println(" Control: " + controlName);
Serial.println(" Key: " + key);
Serial.println(" Value: " + value);
if (controlName == "sensor" && key == "temperature") {
float temp = value.toFloat();
// Traitement de la température...
}
}
void handleError(const char* error) {
Serial.println("🔥 Erreur: " + error);
}Exemple 2: Contrôle Moteur
#include "SchreinSerialParser.h"
SchreinSerialParser parser(Serial);
void setup() {
Serial.begin(115200);
parser.enableChecksum(true);
}
void loop() {
parser.loop();
if (parser.isFrameAvailable()) {
const char* speed = parser.getValue("motor", "speed");
const char* direction = parser.getValue("motor", "direction");
if (speed != "") {
int motorSpeed = atoi(speed);
controlMotor(motorSpeed);
}
if (direction != "") {
setMotorDirection(direction);
}
parser.resetFrame();
}
}
void controlMotor(int speed) {
// Implémentation contrôle moteur
analogWrite(9, speed);
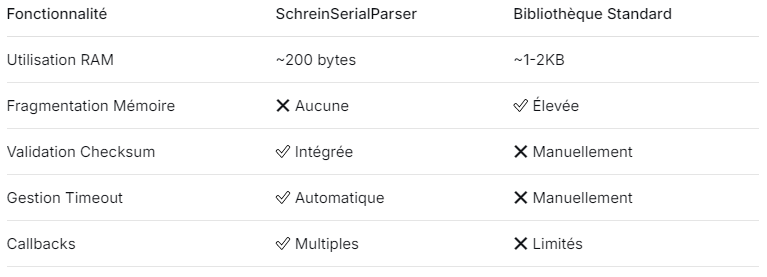
}📊 Comparaison de Performance
Utilisation Mémoire

Performance
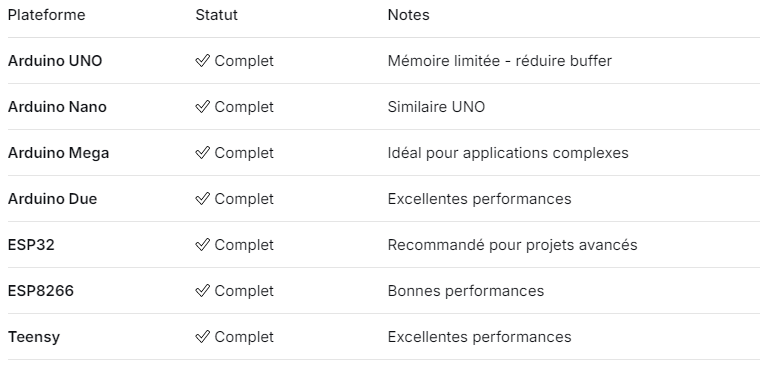
Plateformes suppertés
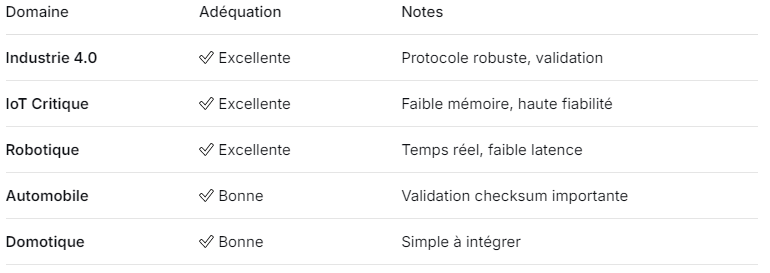
Applications Types
⚠️ Bonnes Pratiques
✅ À faire
- Toujours appeler
parser.loop()dans la boucle principale - Vérifier
isFrameAvailable()avant de lire les données - Appeler
resetFrame()après traitement - Utiliser les callbacks pour une architecture événementielle
- Activer le checksum pour les communications critiques
❌ À éviter
- Ne pas bloquer dans
loop()principal - Ne pas oublier de libérer avec
resetFrame() - Éviter les délais longs qui causent des timeouts
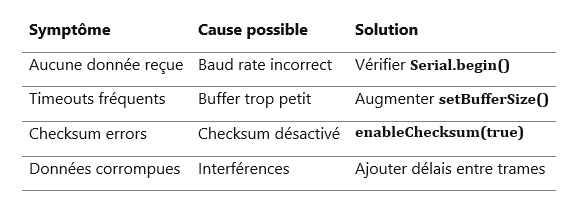
🔧 Dépannage
Problèmes courants
Test de communication
void testCommunication() {
// Test d'envoi/réception
const char* testFrame = parser.command("test", "ping", "hello");
parser.sendFrame(testFrame);
// Vérification debug
Serial.println(parser.debugOutput("receiveMessage"));
}📈 Performance
- Buffer configurable selon les besoins
- Timeout adaptable à l’application
- Gestion mémoire optimisée
- Callbacks non-bloquants
Cette documentation couvre l’ensemble des fonctionnalités de la librairie SchreinSerialParser. La structure modulaire et les callbacks permettent une intégration flexible dans divers projets Arduino.